从小我就喜欢观察各种工程设备。我的舅舅是一名工程建设工作者,每次他带我去工地,我都被那些仪器设备所吸引:测距仪、水平仪、转速表、测厚仪……它们让工地上的数据变得精准而可靠,也让我第一次意识到“工程的精确,离不开科学的支撑”。那时候,我就对这些设备充满了好奇,总喜欢拆解、观察它们的结构和工作原理。
随着对科技的兴趣越来越浓,我萌生了一个念头:能不能自己设计并制作一款测量仪器,让工程测量更方便?这个想法最初只是一个模糊的念头,但在一次科学课上,我向科学老师刘老师提到了这个设想。刘老师听后非常鼓励,告诉我可以尝试用我们在科技社团学过的Arduino微控制器来实现测距功能。老师还建议我把设计从纸上构思转化为真实的结构模型,并引导我使用3D打印技术来完成外壳的制作。
在刘老师的指导下,我开始系统地了解距离测量的基本原理。我了解到,距离测量的核心过程是“信号发射—反射—接收”,其原理是根据信号在传播过程中往返所用的时间差计算出物体的距离。这一原理不仅体现了物理学中声波传播与反射的知识,也能与电子控制和编程技术结合,非常适合作为一个跨学科的工程实践项目。
为了选择合适的传感器,我查阅了大量资料,比较了常见的几种方案。最终,我选定了超声波传感器作为核心元件。这种传感器性价比高、精度适中,测量范围在2cm至400cm之间,非常适合入门级实验与教学应用。相比之下,红外测距传感器在光照强的环境中容易受干扰,而超声波传感器则具有更好的稳定性。刘老师在这个过程中也提醒我注意实验环境的声波反射条件,并指导我在设计结构时考虑传感器的安装角度与声波扩散范围。
在明确方案后,我们决定使用Arduino Nano作为控制核心,通过编写程序实现超声波信号的发送与接收,再将测量结果显示在OLED屏幕上。同时,为了使外观更加专业、结构更加稳定,我计划用3D打印机制作一个专属外壳。刘老师帮助我学习了Tinker cad三维建模软件的使用方法,并教我如何根据电子元件的尺寸设计卡槽与固定结构。
于是,我的“自制多功能测量仪”项目正式启动。这个小装置不仅能够测量距离,还可以切换到“转速模式”,通过红外传感器测量旋转物体的转速。项目的每一步——从建模、打印、组装到编程调试——都让我更深刻地体会到工程设计的系统性与科学原理的严谨性。通过不断的尝试与改进,我的动手能力、逻辑思维和科学探究能力都得到了明显的提升,也更加理解了科学创新背后“理论与实践结合”的重要意义。
一、设计思路与结构组成
1.主要材料与工具
本项目所需材料包括:Arduino Nano开发板、按钮开关、微型面包板、超声波传感器HC-SR04、红外传感器、OLED显示模块、3D打印机与PLA打印丝、Arduino IDE编程软件、热熔胶与强力胶
这些元件大部分都能在创客实验室或电子市场轻松获取。为了确保装置结构稳定、美观,我采用了3D打印技术制作外壳。
2.结构设计与建模
我使用Tinker cad软件进行外壳建模。虽然该软件对初学者比较友好,但在第一次使用时,我仍遇到不少困难。例如在调整尺寸和确定螺丝孔位置时,经常需要反复修改。通过查阅教程并多次试验,我逐渐掌握了3D建模的技巧。
在外壳设计上,我希望它既紧凑又便于安装组件,因此选用了模块化结构:底座、主体和顶部盖板分开打印。各传感器在外壳中都有专用的卡槽,既能保证安装稳定,又方便后期维护。


3.电路设计与连接
在硬件部分,我主要使用了Arduino Uno(原理相同,后续可移植到Nano)作为控制核心。电路包含三个关键模块:OLED显示模块、超声波传感器、红外传感器。
所有模块的接线方式如下:超声波传感器HC-SR04:、Trig接Arduino数字口D8、Echo接D7。红外传感器:输出接D6、OLED显示模块:SCL→A5、SDA→A4。按钮切换开关:一端接D5,另一端接GND。所有模块的VCC端接Arduino的5V电源,GND全部共地。
为了减少导线数量,我将多个GND通过跳线集中汇总再接入主地线端。
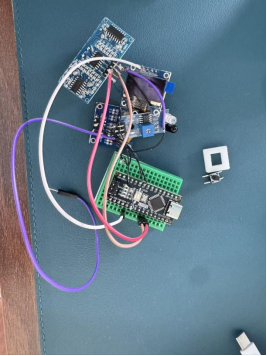
4.电路安装与封装
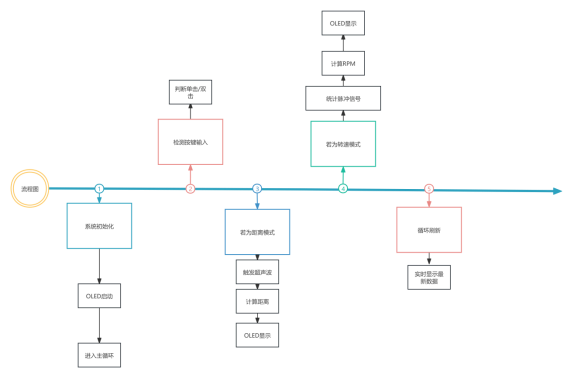
在本项目中,软件部分是实现整个测量仪器智能化控制的核心。程序基于ArduinoIDE平台编写,主要使用了C/C++语言,结合Adafruit_SSD1306与Adafruit_GFX库,用于驱动OLED显示屏并实现数据显示。整体程序结构清晰,功能主要包括模式切换、超声波测距、转速计算、OLED可视化显示等部分。
这一段是整个测距功能的核心代码。
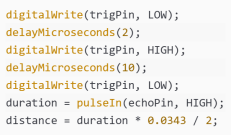
这一段是整个测距功能的核心代码。
首先向trigPin发出10微秒的高电平脉冲,以触发超声波信号的发射;
pulseIn()函数测量echoPin从低电平到高电平的持续时间(即超声波从发射到返回的时间差);根据空气中声速(约343m/s),通过公式
计算出距离值(单位为厘米)。
由于信号往返传播,程序中需除以2来得到单程距离。
系统每隔1秒统计一次转动次数并换算为转速(RPM)。millis()函数用于获取自启动以来的毫秒数,以保证定时精准。
按下按钮可在“距离测量模式”和“转速模式”之间切换;在OLED屏上动态显示测量结果。
通过对程序的深入理解,我更加体会到软件控制在现代工程测量中的重要作用。
超声波测距依赖物理声波传播规律,而红外测速则基于光电效应原理;而程序通过逻辑判断、时间控制与数据可视化,将这些物理量转化为清晰的数值信息,真正实现了“从科学原理到工程实践的闭环”。
在科学老师刘老师的指导下,我学会了用程序的思维去表达工程逻辑:用中断机制实现高效响应;用时间函数实现精确测量;用显示库函数实现数据可视化。
这让我理解到,硬件是骨架,程序是灵魂。两者相辅相成,才能构建出真正有用的工程工具。
二、设备的使用方法
设备通电后,默认进入距离测量模式。将传感器对准目标物体,即可实时在OLED上看到距离读数,单位为厘米(cm)。
按下按钮后,设备切换至转速模式。此时红外传感器开始工作。当被测物体(如轮子)上贴有一段白色反光胶带时,每当该位置经过传感器,光信号反射被接收,从而计算旋转周期,并转换为每分钟转速(RPM)。再次按下按钮可返回距离模式,循环切换。整个操作逻辑简单明了,适合现场测量或教学演示。设备通过USB供电,功耗较低。使用完毕后可断开电源,并将仪器放入随身工具袋中携带。
三、实验效果与测试结果
我在家中和学校实验室分别对该设备进行了测试。测试结果如下:
可以看出,测量结果与理论值非常接近。对于一个自制的学生级实验设备来说,这样的精度已非常理想。
四、遇到的困难与解决办法
在整个项目的制作过程中,我遇到了不少困难,但正是这些挑战让我在实践中不断成长,积累了宝贵的经验。
(1)3D建模与结构设计困难
在初次使用Tinker cad软件进行建模时,我发现对齐和调整尺寸是一项非常细致的工作。由于各个电子元件的大小和孔距都有标准规格,如果模型中哪怕有1~2毫米的误差,就可能导致组件无法顺利安装。起初,我多次打印失败,要么尺寸过小无法嵌入,要么孔位偏差导致安装倾斜。
在刘老师的指导下,我学会了使用“标尺(Ruler)”和“对齐(Align)”工具进行精确建模,并逐渐掌握了参数化设计思维——通过设置具体数值而不是手动拖拽来完成调整。经过多次尝试与修改,我终于能精准地绘制出符合组件尺寸的外壳模型,并通过3D打印获得理想成品。这一过程让我深刻体会到,科学设计的精确性是工程成功的关键。
(2)电路连接与固定问题
由于我此前没有焊接过电路,这次没有采用焊接方式,而是使用杜邦线进行连接。虽然杜邦线使用方便、可重复插拔,但我很快发现它也存在一个问题——接口容易松动或脱落。尤其在设备多次测试时,轻微晃动就可能导致电路断开,使测量数据中断或显示异常。
为了增强稳定性,我参考老师的建议,用热熔胶对关键连接部位进行固定。热熔胶不仅能防止松动,还能在需要拆卸时加热取下,不会损伤元件。通过这种方法,我有效提高了电路的可靠性。
此外,我还学习了如何使用万用表检测连通性,及时排查导线接触不良的问题。每次通电前,我都会逐一确认电路是否连通,确保设备在调试过程中不会出现短路或供电异常。
(3)程序上传与显示调试问题
在软件部分,我最初遇到的最大难题是程序上传后OLED显示不正常。屏幕有时会闪烁、有时完全无显示,这让我一度怀疑是硬件损坏。后来,在刘老师的帮助下,我通过串口监视器输出中间变量,逐步排查程序逻辑。
最终发现问题出在延时函数和循环刷新之间的冲突上:由于延时过长,屏幕刷新频率受到影响,导致显示卡顿。通过修改程序结构、优化delay()函数和display.display()的调用时机,我成功解决了这个问题,使数据能稳定、实时地显示。
通过这几次困难的解决过程,我深刻体会到:工程设计不仅是技术的堆叠,更是耐心、细心与思考的结合。
每一次失败的尝试都让我更加理解科学实验的严谨性,也让我在“从问题中学习”的过程中不断进步。如今回头看,这些困难反而成为我最宝贵的学习财富。
五、创新点与应用价值
本项目的创新不仅体现在功能设计上,更重要的是它的实践性与工程可操作性。整个制作过程从方案构思、3D建模、电路搭建到程序调试,几乎每一步都需要亲手完成,真正实现了“在做中学、在学中创”的过程。
(1)低成本高性能方案
在材料选择和硬件配置上,本项目注重性价比与稳定性的平衡。
使用常见的Arduino控制板与HC-SR04超声波传感器组合,在保证测量精度的同时,显著降低了硬件成本。整套系统成本不足100元,却能实现厘米级精度的测距,性能上可与部分商用入门测距仪相媲美。
此外,程序中采用了去抖动中断机制、时间差计算与OLED数据可视化技术,使整个系统运行稳定、刷新流畅。通过科学的电路布局和合理的信号处理逻辑,本项目在低功耗、小体积、高精度方面都取得了良好的平衡,充分体现出“小装置、大智慧”的设计思想。
(2)工程实践与教育结合
本项目不仅具有科学研究与工程应用价值,同时也具有较强的教学与示范意义。
它将“声波传播”“信号反射时间差法”“光电信号检测”等抽象的物理知识,以直观、可操作的形式展现出来,使学习者能够直接观察到测量过程和数据变化。
在科学老师刘老师的指导下,我将本装置作为课堂演示工具,让同学们直观理解超声波测距和红外测速的原理。
实验表明,这种可视化、可交互的方式极大地提高了同学们的学习兴趣和理解深度。
因此,本项目不仅是一项个人创新实践,更是一种科学教育与工程思维结合的探索。
(3)实践性与科学探究并重
整个项目的最大收获在于它的实践性极强。从构想到成品,我经历了建模失败、电路松动、程序异常等多次挫折,也正是在一次次动手尝试与问题解决的过程中,我体会到科学实验与工程实现之间的紧密联系。
每当我看到设备在OLED屏幕上成功显示出距离或转速数据,所有的调试与修改都变成了成就感。
这让我更加明白,真正的科技创新不是一蹴而就的,它需要反复试验、持续优化,更需要对科学原理的深刻理解与实际操作的严谨态度。
未来,我希望在此基础上继续优化项目性能。
首先,计划加入蓝牙无线传输模块,实现测量数据与手机APP的实时同步,提升便携性与交互性;其次,尝试引入AI算法或卡尔曼滤波技术,对测量数据进行智能修正与噪声过滤,以进一步提升精度与稳定性;此外,我还希望结合太阳能微型电源系统,使设备更节能环保,可在户外工程环境中长时间运行。
通过这次项目,我更加理解舅舅常说的一句话:
“工程的本质,是让科学落地。”
无论是建筑测量还是电子制作,科学原理只有通过工程手段的转化,才能真正服务于生活与社会需求。
这次经历让我坚信:兴趣是创新的起点,实践是通往成功的唯一途径。
我相信,这个小小的工程项目只是我科技探索旅程的开端,它让我看到了科学与工程融合的力量,也让我更加坚定了未来走向工程科技道路的决心。